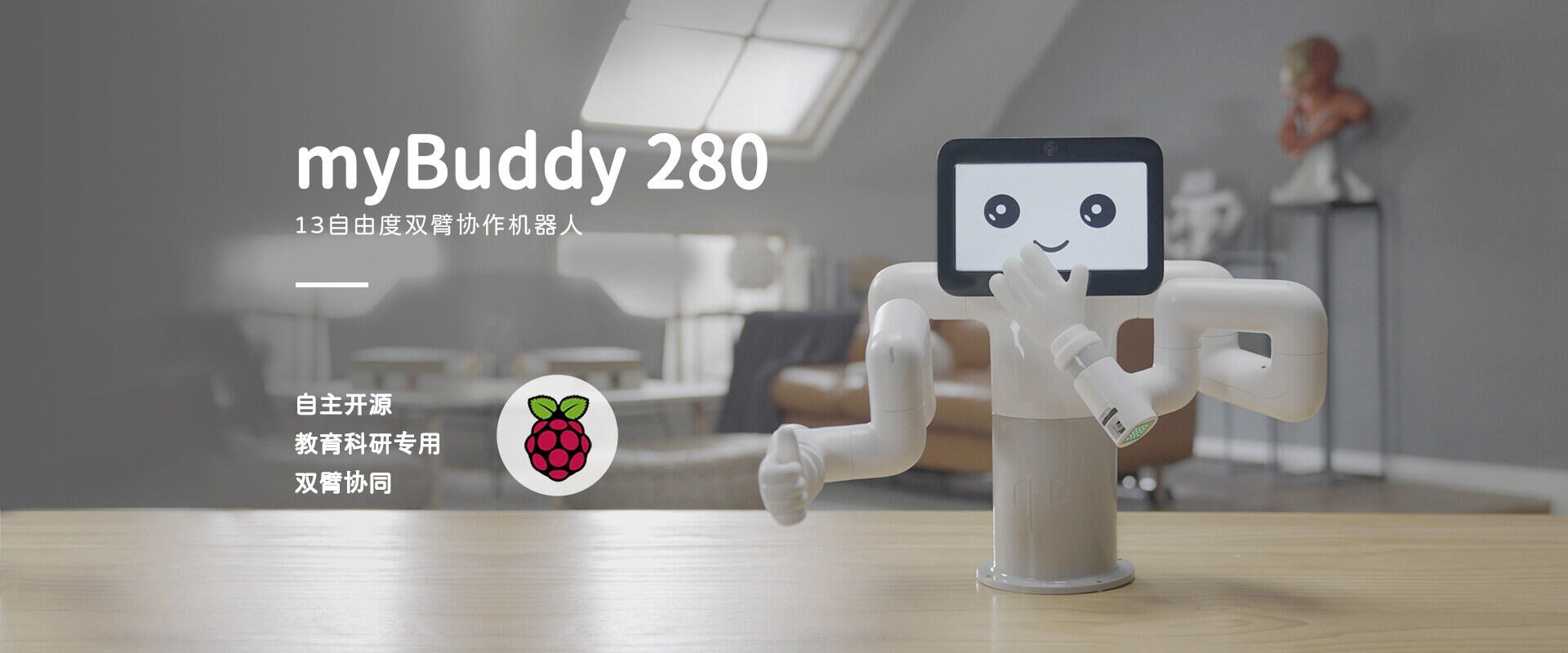
myBuddy 280 技術(shù)支持 產(chǎn)品特性 技術(shù)參數(shù) 使用手冊 前往淘寶 前往京東 自由度 13DOF 單臂負(fù)載 250g 13 自由度協(xié)作機器人 開放ROS仿真開發(fā)環(huán)境、內(nèi)置運動學(xué)正逆解算法、全系列累計銷售至全球60+國家,出貨量超5000余臺,隨時隨地開始你的智能制造機器人學(xué)習(xí)之旅! 開源研究教育機器人 基于本產(chǎn)品還可以進行商業(yè)展示、預(yù)研發(fā)場景融合等企業(yè)級應(yīng)用,我司提供機器人應(yīng)用相關(guān)套件及開發(fā)教程,有助于用戶更加便捷開發(fā)使用;7寸可交互式顯示屏幕,內(nèi)置20+動態(tài)表情;支持 VR控制,虛擬現(xiàn)實結(jié)合,讓控制更簡單。 上一項 下一項 視覺開發(fā)環(huán)境 內(nèi)置視覺開發(fā)環(huán)境 可實現(xiàn)人工智能抓取方案學(xué)習(xí)與教學(xué)!標(biāo)準(zhǔn)人工智能攝像頭接口,下方camera 45度,可以進行識別區(qū)域定位,物體識別,識別二維碼,上方camera 可以識別人臉、肢體識別等。 機器人玩家創(chuàng)想之旅! 開放底層控制接口,可自由控制電位值、角度、坐標(biāo)、運行速度等接口,雙臂應(yīng)用研究,運動路徑規(guī)劃、動作開發(fā)、視覺識別應(yīng)用開發(fā);多種接口滿足商展和教育等多種用途。 ROS學(xué)習(xí)應(yīng)用 機器人系統(tǒng)內(nèi)置ROS仿真開發(fā)環(huán)境、提供了RVIZ,MOVEIT環(huán)境下多種使用案例,如:移動跟隨、滑塊控制、路徑規(guī)劃等多種高級應(yīng)用,同時開放機器人URDF配置文檔,用戶可以進行二次修改開發(fā),使用戶二次開發(fā)應(yīng)用易如反掌。 產(chǎn)品特點 280mm 的運動半徑,最高可達(dá)250g 的末端負(fù)載,0.5MM 的定位精度,協(xié)助實現(xiàn)您的場景探索需求。 樹莓派生態(tài) ROS仿真控制 實踐式新科學(xué)課程 拖動示教 雙4K視頻接口 Linux USB3.0 支持?jǐn)U展攝像頭 無線控制 Python C++ MYBLOCKLY 硬核配置 24V工業(yè)化電氣接口,完成您的工業(yè)場景開發(fā)需求,按鍵交互,屏幕顯示,PLC接口,緊急停止接口,讓你快速安全的搭建機械臂應(yīng)用探索場景。 全面開放的軟件控制接口 依據(jù)科研教育等各類應(yīng)用場景,全面開放控制接口,為你提供更全面、更具針對性的接口選擇,滿足你實現(xiàn)物品分揀、人臉識別、圖像識別等AI場景需求。 主流編程語言支持 我們支持 Python、Blockly主流編程語言 全平臺開發(fā)支持 我們支持Android、Windows、Mac OSX、Linux。 多種連接開發(fā)方式 USB WIFI Bluetooth myBuddy Online Tutorial and Gitbook View Now 簡單開發(fā) 輕松入門使用,拖曳式編程語言,按鍵交互式拖動示教,讓你輕輕松松開啟機械臂使用之旅。 myBlockly 官方提供的圖形化編程軟件、提供教學(xué)配套視頻,可快速上手 Python demo 內(nèi)置數(shù)十個應(yīng)用案例,快速落地,簡單上手 快速工具 可以通過觸摸屏對myBuddy進行快速拖拽試教 ROS仿真控制支持 采用全球主流機器人通訊框架ROS開發(fā),并且支持仿真,在虛擬環(huán)境中進行控制及算法的驗證,降低了對實驗環(huán)境的要求,提高了實驗效率。 myBuddy 280版本開箱視頻 myStudio 一站式的機器人應(yīng)用平臺機器人驅(qū)動安裝,機器人固件升級,使用文檔閱讀,視頻教程觀看等多種功能 前往下載 myBuddy 280 ¥11,186 起 立即購買 官網(wǎng)所有商品價格僅供參考,實際價格以結(jié)算為準(zhǔn)。














-.jpg)




題-1-1-1024x312.jpg)

